Autonomiczny System Transportowy
Projekt robota mobilnego z manipulatorem jest projektem zrealizowanym w ramach grantu rektorskiego pt. „Autonomiczny System Transportowy” w 2015 r. Motywem przewodnim projektu była chęć zbudowania od podstaw konstrukcji mechanicznej, zaprojektowania i wykonania części elektronicznej robota składającej się na układ sterowania jak i napisanie odpowiedniego oprogramowania umożliwiającego autonomiczną pracę robota. Dodatkowym celem pracy była możliwość zdobycia nauki w takich dziedzinach jak mechanika, elektronika i informatyka.
Grant rektorski został obroniony przez koło naukowe w październiku 2015 r. na Konferencji Kół Naukowych pionu Hutniczego AGH, lecz nie wszystko co było planowane, udało się zrealizować. Na dzień dzisiejszy (październik 2015 r.) robot posiada prawie w całości skończoną część mechaniczną oraz zaprojektowaną część elektroniczną. Projekt powstał z myślą o możliwość opracowania w przyszłości platformy dydaktycznej, dzięki której członkowie koła, oraz inni studenci odbywający zajęcia w Katedrze Automatyzacji Procesów, mogliby w praktyce sprawdzić zdobytą wiedzę teoretyczną z zakresu robotyki mobilnej, sterowania napędami, wyliczania trajektorii kinematycznych mechanicznego ramienia, jak również nauczyć się obsługi czujników, zintegrowanych modułów elektronicznych, programowania jednostek mikroprocesorowych, nauki wykorzystania systemów RTOS, czy implementacji systemu wizyjnego w procesie sterowania.
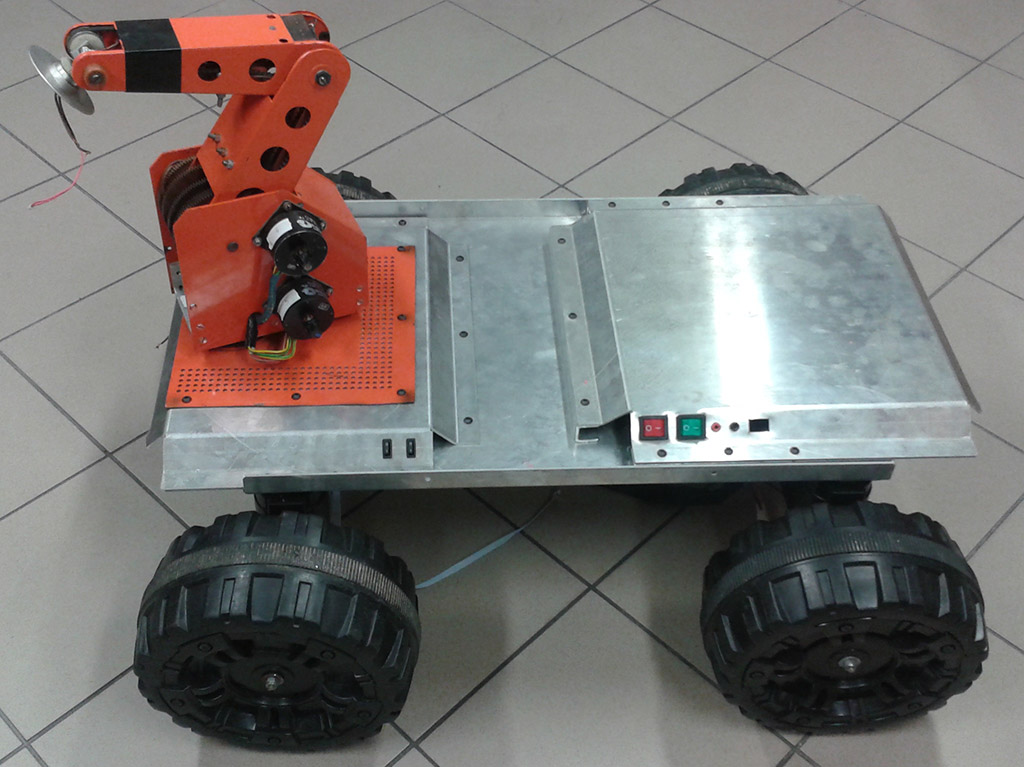
Konstrukcja mechaniczna robota mobilnego została oparta na mobilnej platformie wyposażonej w 2 silniki napędowe o mocy ok. 100 W i 4 silnikach małej mocy umożliwiających niezależny skręt każdego koła z osobna (w zakresie kątowym 0-120°), dzięki czemu zwiększone zostały możliwości wysterowania platformy. Dodatkowo, robot posiada manipulator antropomorficzny o 5 stopniach swobody, z napędami w postaci silników krokowych unipolarnych. Manipulator został wyposażony w 3 czujniki krańcowe, sygnalizujące skrajne dopuszczalne położenia członów mechanicznych ramienia robota. Obecnie (2016 r.) konstrukcja mechaniczna posiada modułu chwytaka i tymczasowo nie jest możliwe chwytanie przedmiotów manipulacji. Na najbliższy czas zaplanowano modyfikację manipulatora i platformy jezdnej oraz opracowanie i wykonanie chwytaka.
Robot został oparty na dwóch komputerach jednopłytkowych Raspberry Pi B2 i STM32F4 Discovery, które w ostatnich latach znacznie wzrosły na popularności - zarówno wśród studentów, jak i firm. Dodatkowo, dla Raspberry Pi B2 przewidziano możliwość zainstalowania systemu operacyjnego Raspbian. Poza wymienionymi jednostkami sterującymi, w projekcie zastosowano takie mikroprocesory jak ATXmega128A3U, STM32F051C6T6 oraz LPC1114FB48. Zastosowana różnorodność wykorzystanych mikroprocesorów wynika z chęci zapewnienie różnorodnej platformy dydaktycznej, na podstawie której studenci będą mogli nauczyć się programować komputery jednopłytkowe i mikroprocesory różnych producentów. Warto podkreślić również fakt, iż główna jednostka mikroprocesorowa (Raspberry PI B2) umożliwia zaimplementowanie i wykorzystanie systemu wizyjnego w postaci 3 kamer, za pomocą których możliwe jest dokonywanie analizy obrazu i co za tym idzie: sterowanie konstrukcją.
Część elektroniczna robota została zaprojektowania ale obecnie nie została jeszcze wykonana. Aktualnie trwają prace nad prototypami poszczególnych modułów elektronicznych, w tym wykonania zaprojektowanych płytek PCB. Układ sterowania robota został oparty na 7 płytkach PCB, które zawierają m.in. sterowniki silników krokowych manipulatora, sterownik silników DC, kontrolery źródeł zasilania, moduły czujników różnego typu, moduły obsługi kamer systemu wizyjnego, moduły komunikacji bezprzewodowej i przewodowej, szereg zabezpieczeń elektrycznych (np. wyłączniki nadprądowe, czy przeciwprzepięciowe) i wiele innych.
Ze względu na obszerność prac, obecnie nie udało się jeszcze zacząć części informatycznej. W dalszej przyszłości planowane jest opracowanie dwóch trybów pracy robota: trybu manualnego i trybu autonomicznego.
Projekt robota mobilnego z manipulatorem wymaga jeszcze dużego nakładu pracy, szczególnie przy części programistycznej robota. Koło naukowe z chęcią przyjmie do zespołu projektu nowe osoby, które gotowe byłyby podjąć się realizacji zagadnień związanych z np. obsługą systemu wizyjnego, algorytmami generowania trajektorii lub szeroko pojętego programowania. Zespół projektu otwarty jest na nowe pomysły oraz gotowy do współpracy.
Autorzy projektu
Karol AdrianekOsiągnięcia
Grant Rektorski - 2015 r.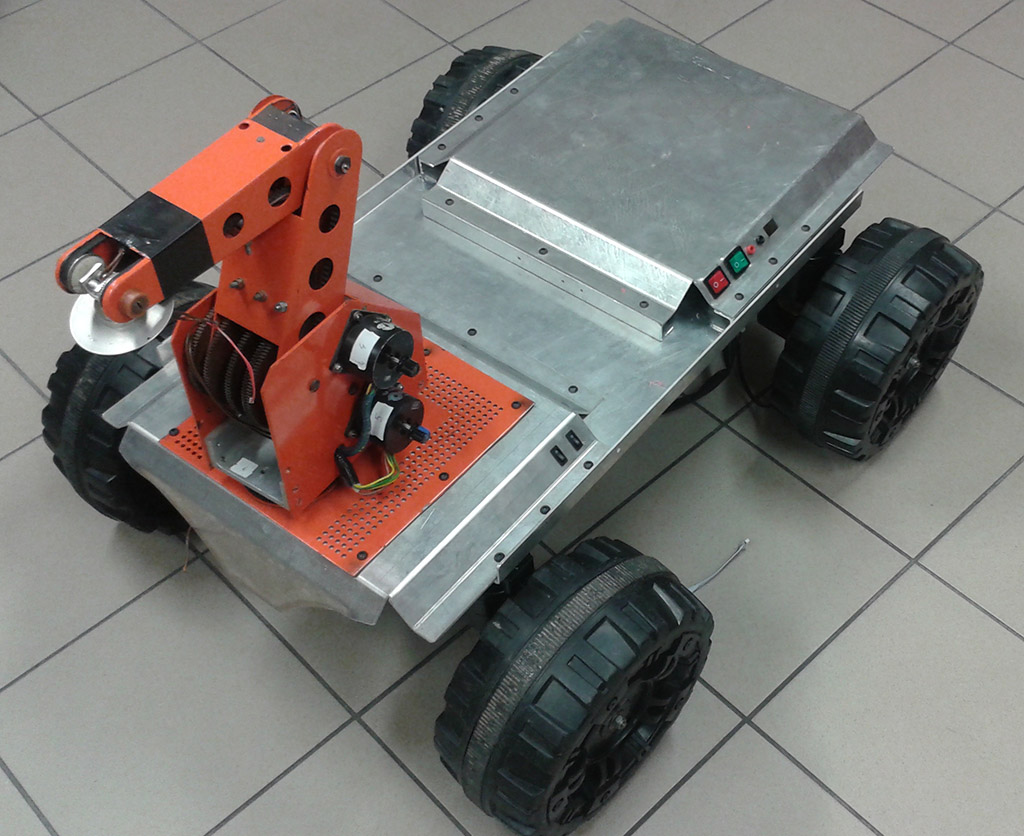

System of Wide-Applicable Robotics Modules (SWARM)
Projekt swoją nazwę wziął od angielskiego słowa SWARM, co w tłumaczeniu oznacza rój. Ogólną koncepcją całego przedsięwzięcia było stworzenie roju robotów mobilnych, którego osobnikami byłyby konstrukcje zdolne komunikować się między sobą i wymieniać zdobytą w czasie wykonywania zadania wiedzę.
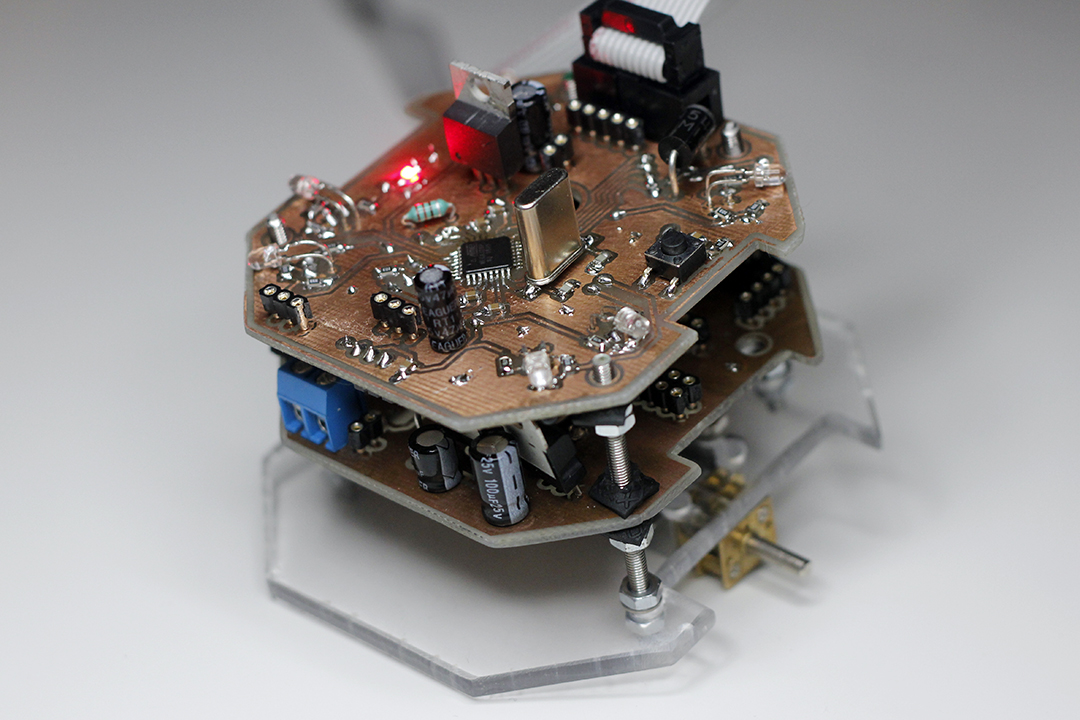
Pojedyncza platforma posiada wymiary 80x80 mm (minirobot) i zbudowana jest z dwóch modułów. Pierwszy moduł stanowi płytka PCB zawierająca mikrokontroler AVR, regulatory napięcia, sterowniki silników DC oraz interfejsy enkoderów. Drugi moduł odpowiada za możliwości poznawcze robota. W jej skład wchodzi jeden analogowy czujnik odległościowy, 6 cyfrowych czujników odległości opartych na świetle podczerwonym oraz czujnik barwy światła. Komunikacja między dwoma płytkami realizowana jest za pomocą SPI, a ich programowanie umożliwiają wyjścia ISP.
W celu komunikacji osobników ze sobą wykorzystano sieć WiFi i popularny układ ESP8266. Rozwiązanie takie pozwala identyfikować każdą platformą za pomocą przypisanego do niego statycznego adresu IP. Dodatkowym atutem takiego rozwiązania jest możliwość monitorowania stanu robotów z poziomu przeglądarki internetowej.
Koło Naukowe Controllers otrzymało Grant Rektorski w 2016 roku na kontynuację projektu.
Autorzy projektu
Grzegorz Bartyzel Filip Bugajski Radosław Szczeciński Tomasz WronaOsiągnięcia
Nagroda Specjalna podczas Targów Projektów Akademickich w czerwcu 2015 r. Grant Rektorski - 2016 r.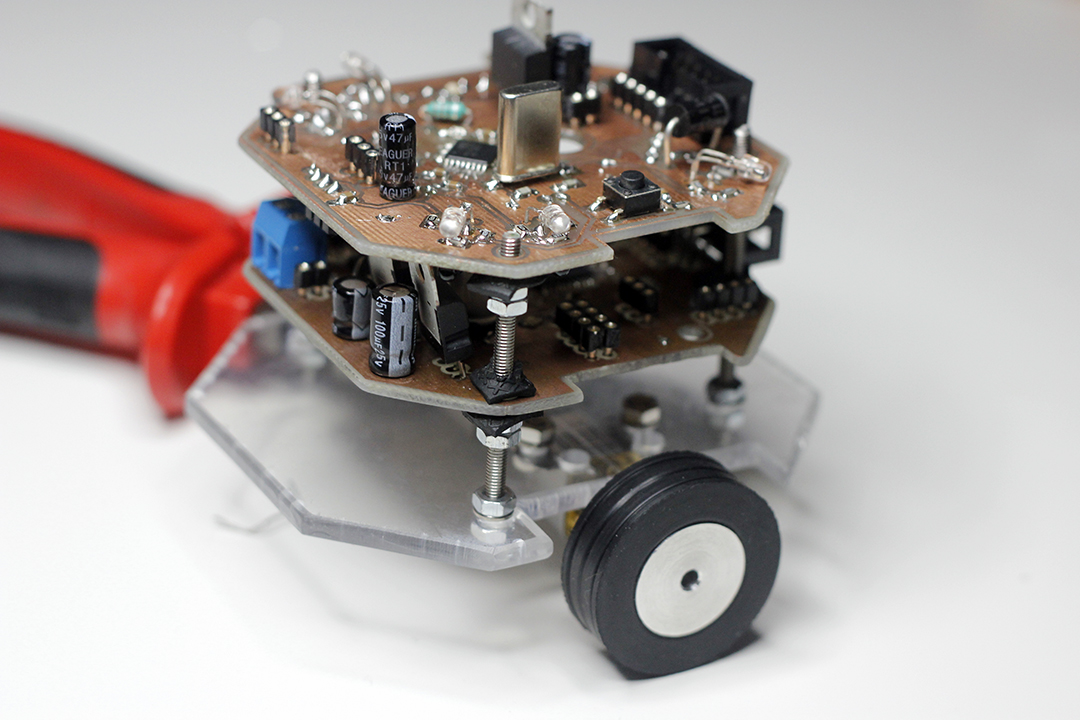
Archiwalne projekty
-
Projekt i budowa dwuosiowego układu pozycjonowania
Autorzy: Konrad Kozub -
Projekt oraz wykonanie stanowiska labora-toryjnego symulującego przejazd kolejowy oraz przejście dla pieszych
Autorzy: Karol Kuliga -
Zastosowanie kontrolera MSP430 w porównaniu właściwości wybranych akcelelometrów MEM
Autorzy: Maciej Kożuch -
Projekt kuli plazmowej
Autorzy: Łukasz Basąg -
Frezarka CNC wraz z wielozadaniowym centrym obróbczym
Autorzy: Kamil Kuźniar -
Miniaturowy system pomiarowy do monitorowania stanu powietrza przy zastosowaniu urządzeń mobilnych z systemem Android i komunikacji Bluetooth
Autorzy: Bartosz Kurzak Emil Mach - Naprawa stanowiska naukowego sterowanego przez sterowniki PLC